加拿大Mecademic公司介紹
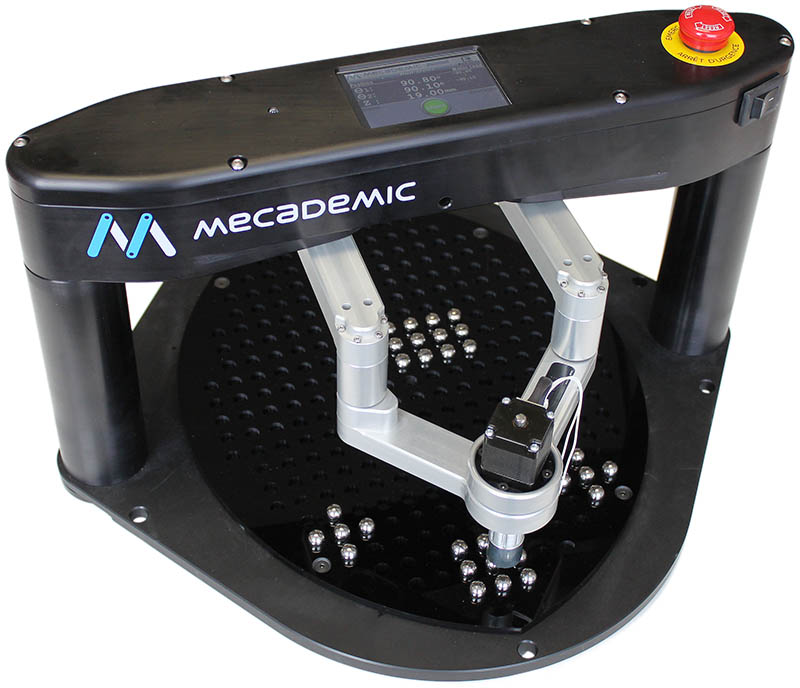 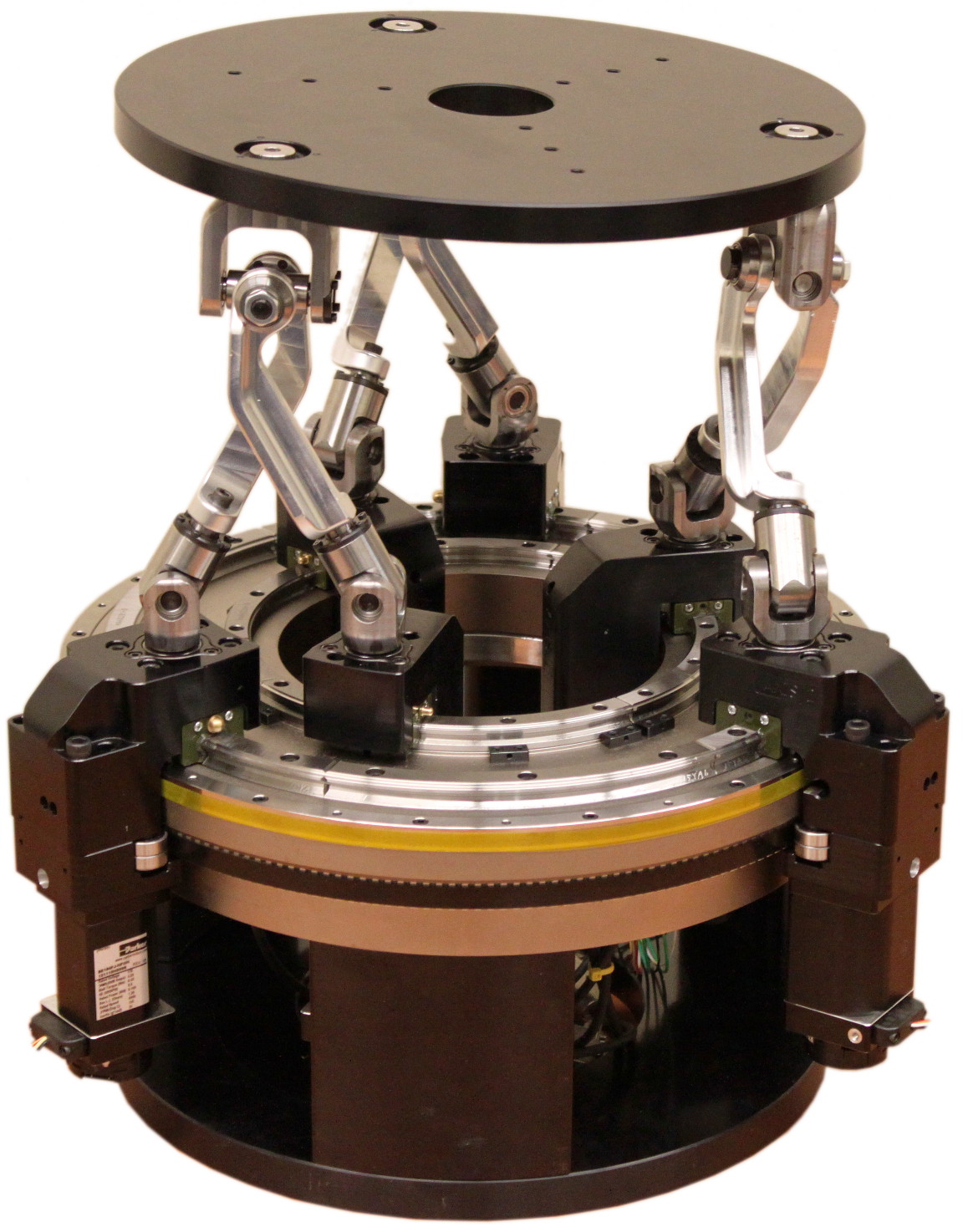
旋轉六腳機器人是由Jonathan Clolome在他的大學期間開發的。2013年成立的Mecademic公司,正在建造可支付得起的工業級教育機器人。我們成立Mecademic公司的原因,是因為我們對現在的教育機器人的選擇感到泄氣。一個教育學院要花至少2萬美元去買一個工業機器人或者買一個玩具級的機械手。隨著DexTAR的出現,我們建造了一個新型的專業的但廉價的教育機器人。 Mecademic公司是école de technologie supérieure (éTS)學校的控制與機器人實驗室(CR)的分公司,ETS是加拿大zui大型和有工業導向的學校。這個公司是由Jonathan Coulombe在完成大學電子工程的學業時創建的。在加入ETS之前,Jonathan已經作為精確機械師工作了十年,在業余時間還精確制作廉價機器人手臂。到了ETS后,他加入了 Prof. Ilian Bonev的研究團隊,開發具有創新的旋轉型六腳機器人。 Prof. Ilian Bonev作為Mecademic的科學導師,他因一個名叫Paralle MIC的并行機器人而出名。Prof. Ilian Bonev現在是加拿大精確機器人研究協會的主席,和CR的負責人。他還教一些有關工業機器人的高級實踐課程,他的研究生已涉入ABB,FUNUC,KUKA,MOTOMAN生產的工業機器人,及UR,KUKA,KAWADA等生產的協作機器人。 Mecademic公司在加拿大蒙特利爾市區的辦公室里設計,生產和組裝臺式機器人。 雙臂 SCARA教育機器人 總描述 DexTAR(Twin-Arm Robot)是一個三軸雙臂SCARA機器人,專門為教學和培訓之用。它主要的核心是五桿機械。這個5桿機械師并行機器人的教學范例,是傳輸不同的機器人概念的教學模板。盡管DexTAR機器人是一個教育機器人,但它滿足工業機器人的各種標準。它包括精確加工鋁材料,兩個90W的伺服馬達驅動,一個步進馬達和線性執行器。這個機器人也配有高精度加碼器。 DexTAR機器人利用電磁塊來拾取鋼球,但是定制的末端器很容易安裝。這個時尚的臺式機器人滿足所有的機器人安全標準,并配有內部鎖定保護蓋(圖片未顯示),DexTAR是非常輕巧,便攜和廉價可支付型的,不再使用笨重的教導器。 DexTAR是程控型的,而且也是離線型的。模擬和離線程控軟件是在WINDOWS操作系統下運行的。在模擬前,程序可以由用戶自己利用簡單的機器人編寫語言編寫,然后再編輯。可編寫程序是準備模擬,或通過USB電纜直接從計算機下載到機器人的內存里。存儲在機器人內存里的程序通過機器人的觸摸屏來執行(不需要連接計算機) 教學材料也包括在內,以便容易把DexTAR機器人融入現成的課程里。 技術參數: Mechanical specificationsFootprint | 435 mm × 420 mm (17.1 in × 16.5 in) | Weight | 10.2 kg (22.5 lb) | XY Workspace | Larger than a circular area of diameter 242 mm (9.5 in)* | Axis 1 & 2 encoder resolution | 0.011° | Axis 1 & 2 max speed | 720°/s | XY max linear speed | 300 mm/s (11.8 in/s) | Z axis stroke | 19 mm (0.75 in) | Z axis resolution | 0.025 μm (0.001 in) | Z axis max speed | 120 mm/s (4.7 in/s) | Position repeatability | 0.025 mm (0.001 in) |
*The actual workspace is the lens-shapped area shown in the above JavaScript simulation. Electrical specificationsPower | 24 V / 9.17 A (external power supply with country-specific power cord) | Touch screen | 480 × 320 pixels
Full color 3.5 in display | Tool interface | 1 output 24 V
(for the electromagnet) | Communication | USB 2.0 port
(for uploading programs) | Connectivity | Connector for third-party control card* |
可選項-運輸車NANUK 960
 
旋轉六腳機器人是由Jonathan Clolome在他的大學期間開發的。2013年成立的Mecademic公司,正在建造可支付得起的工業級教育機器人。我們成立Mecademic公司的原因,是因為我們對現在的教育機器人的選擇感到泄氣。一個教育學院要花至少2萬美元去買一個工業機器人或者買一個玩具級的機械手。隨著DexTAR的出現,我們建造了一個新型的專業的但廉價的教育機器人。 Mecademic公司是école de technologie supérieure (éTS)學校的控制與機器人實驗室(CR)的分公司,ETS是加拿大zui大型和有工業導向的學校。這個公司是由Jonathan Coulombe在完成大學電子工程的學業時創建的。在加入ETS之前,Jonathan已經作為精確機械師工作了十年,在業余時間還精確制作廉價機器人手臂。到了ETS后,他加入了 Prof. Ilian Bonev的研究團隊,開發具有創新的旋轉型六腳機器人。 Prof. Ilian Bonev作為Mecademic的科學導師,他因一個名叫Paralle MIC的并行機器人而出名。Prof. Ilian Bonev現在是加拿大精確機器人研究協會的主席,和CR的負責人。他還教一些有關工業機器人的高級實踐課程,他的研究生已涉入ABB,FUNUC,KUKA,MOTOMAN生產的工業機器人,及UR,KUKA,KAWADA等生產的協作機器人。 Mecademic公司在加拿大蒙特利爾市區的辦公室里設計,生產和組裝臺式機器人。 雙臂 SCARA教育機器人 總描述 DexTAR(Twin-Arm Robot)是一個三軸雙臂SCARA機器人,專門為教學和培訓之用。它主要的核心是五桿機械。這個5桿機械師并行機器人的教學范例,是傳輸不同的機器人概念的教學模板。盡管DexTAR機器人是一個教育機器人,但它滿足工業機器人的各種標準。它包括精確加工鋁材料,兩個90W的伺服馬達驅動,一個步進馬達和線性執行器。這個機器人也配有高精度加碼器。 DexTAR機器人利用電磁塊來拾取鋼球,但是定制的末端器很容易安裝。這個時尚的臺式機器人滿足所有的機器人安全標準,并配有內部鎖定保護蓋(圖片未顯示),DexTAR是非常輕巧,便攜和廉價可支付型的,不再使用笨重的教導器。 DexTAR是程控型的,而且也是離線型的。模擬和離線程控軟件是在WINDOWS操作系統下運行的。在模擬前,程序可以由用戶自己利用簡單的機器人編寫語言編寫,然后再編輯。可編寫程序是準備模擬,或通過USB電纜直接從計算機下載到機器人的內存里。存儲在機器人內存里的程序通過機器人的觸摸屏來執行(不需要連接計算機) 教學材料也包括在內,以便容易把DexTAR機器人融入現成的課程里。 技術參數: Mechanical specifications
Footprint | 435 mm × 420 mm (17.1 in × 16.5 in) | Weight | 10.2 kg (22.5 lb) | XY Workspace | Larger than a circular area of diameter 242 mm (9.5 in)* | Axis 1 & 2 encoder resolution | 0.011° | Axis 1 & 2 max speed | 720°/s | XY max linear speed | 300 mm/s (11.8 in/s) | Z axis stroke | 19 mm (0.75 in) | Z axis resolution | 0.025 μm (0.001 in) | Z axis max speed | 120 mm/s (4.7 in/s) | Position repeatability | 0.025 mm (0.001 in) |
*The actual workspace is the lens-shapped area shown in the above JavaScript simulation. Electrical specifications
Power | 24 V / 9.17 A (external power supply with country-specific power cord) | Touch screen | 480 × 320 pixels
Full color 3.5 in display | Tool interface | 1 output 24 V
(for the electromagnet) | Communication | USB 2.0 port
(for uploading programs) | Connectivity | Connector for third-party control card* |
可選項-運輸車NANUK 960
旋轉六腳機器人是由Jonathan Clolome在他的大學期間開發的。2013年成立的Mecademic公司,正在建造可支付得起的工業級教育機器人。我們成立Mecademic公司的原因,是因為我們對現在的教育機器人的選擇感到泄氣。一個教育學院要花至少2萬美元去買一個工業機器人或者買一個玩具級的機械手。隨著DexTAR的出現,我們建造了一個新型的專業的但廉價的教育機器人。 Mecademic公司是école de technologie supérieure (éTS)學校的控制與機器人實驗室(CR)的分公司,ETS是加拿大zui大型和有工業導向的學校。這個公司是由Jonathan Coulombe在完成大學電子工程的學業時創建的。在加入ETS之前,Jonathan已經作為精確機械師工作了十年,在業余時間還精確制作廉價機器人手臂。到了ETS后,他加入了 Prof. Ilian Bonev的研究團隊,開發具有創新的旋轉型六腳機器人。 Prof. Ilian Bonev作為Mecademic的科學導師,他因一個名叫Paralle MIC的并行機器人而出名。Prof. Ilian Bonev現在是加拿大精確機器人研究協會的主席,和CR的負責人。他還教一些有關工業機器人的高級實踐課程,他的研究生已涉入ABB,FUNUC,KUKA,MOTOMAN生產的工業機器人,及UR,KUKA,KAWADA等生產的協作機器人。 Mecademic公司在加拿大蒙特利爾市區的辦公室里設計,生產和組裝臺式機器人。 雙臂 SCARA教育機器人 總描述 DexTAR(Twin-Arm Robot)是一個三軸雙臂SCARA機器人,專門為教學和培訓之用。它主要的核心是五桿機械。這個5桿機械師并行機器人的教學范例,是傳輸不同的機器人概念的教學模板。盡管DexTAR機器人是一個教育機器人,但它滿足工業機器人的各種標準。它包括精確加工鋁材料,兩個90W的伺服馬達驅動,一個步進馬達和線性執行器。這個機器人也配有高精度加碼器。 DexTAR機器人利用電磁塊來拾取鋼球,但是定制的末端器很容易安裝。這個時尚的臺式機器人滿足所有的機器人安全標準,并配有內部鎖定保護蓋(圖片未顯示),DexTAR是非常輕巧,便攜和廉價可支付型的,不再使用笨重的教導器。 DexTAR是程控型的,而且也是離線型的。模擬和離線程控軟件是在WINDOWS操作系統下運行的。在模擬前,程序可以由用戶自己利用簡單的機器人編寫語言編寫,然后再編輯。可編寫程序是準備模擬,或通過USB電纜直接從計算機下載到機器人的內存里。存儲在機器人內存里的程序通過機器人的觸摸屏來執行(不需要連接計算機) 教學材料也包括在內,以便容易把DexTAR機器人融入現成的課程里。 技術參數: Mechanical specifications
Footprint | 435 mm × 420 mm (17.1 in × 16.5 in) | Weight | 10.2 kg (22.5 lb) | XY Workspace | Larger than a circular area of diameter 242 mm (9.5 in)* | Axis 1 & 2 encoder resolution | 0.011° | Axis 1 & 2 max speed | 720°/s | XY max linear speed | 300 mm/s (11.8 in/s) | Z axis stroke | 19 mm (0.75 in) | Z axis resolution | 0.025 μm (0.001 in) | Z axis max speed | 120 mm/s (4.7 in/s) | Position repeatability | 0.025 mm (0.001 in) |
*The actual workspace is the lens-shapped area shown in the above JavaScript simulation. Electrical specifications
Power | 24 V / 9.17 A (external power supply with country-specific power cord) | Touch screen | 480 × 320 pixels
Full color 3.5 in display | Tool interface | 1 output 24 V
(for the electromagnet) | Communication | USB 2.0 port
(for uploading programs) | Connectivity | Connector for third-party control card* |
可選項-運輸車NANUK 960 |
 設為主頁
設為主頁 加入收藏
加入收藏 聯系我們
聯系我們
